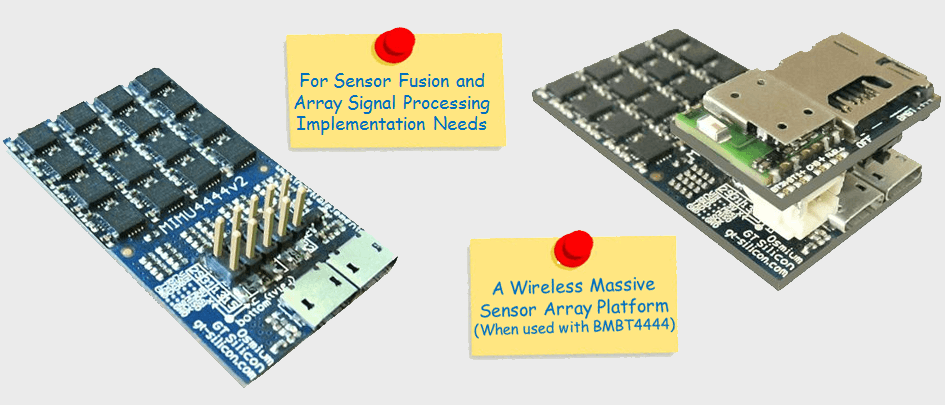
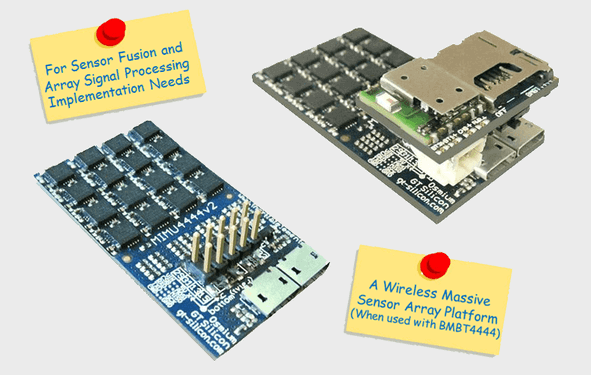
The Osmium MIMU48XC / MIMU4X6C is a variant of massive inertial sensory array module MIMU4844 / MIMU4462, with a 10-pins connector for primarily allowing access to UART and SPI IOs of the micro-controller. In short, MIMU48XC / MIMU4X6C = MIMU4844 / MIMU4462 + 10-pins Connector.
The MIMU48XC / MIMU4X6C, when used with the extension board BMBT4444, is capable of storing data in micro SD card, operating on (re-chargeable Li-ion) battery power and most importantly, wireless communication with the application platform. It operates as a completely standalone module when used with BMBT4444 and a battery.
*The difference between MIMU48XC and MIMU4X6C is the IMU's model number. MIMU48XC includes 9-axis ICM-20948, whereas MIMU4X6C makes use 6-axis MPU-6500. Communication interface of MIMU48XC / MIMU4X6C is compatible with MIMU4X4C. MIMU4X6C is the 6-axis version of MIMU4X9C. MIMU4X4C's support material can be referred for MIMU48XC and MIMU4X9C also.
Please visit Support section for resources, tutorials, FAQs etc and Blog for more information on technology.
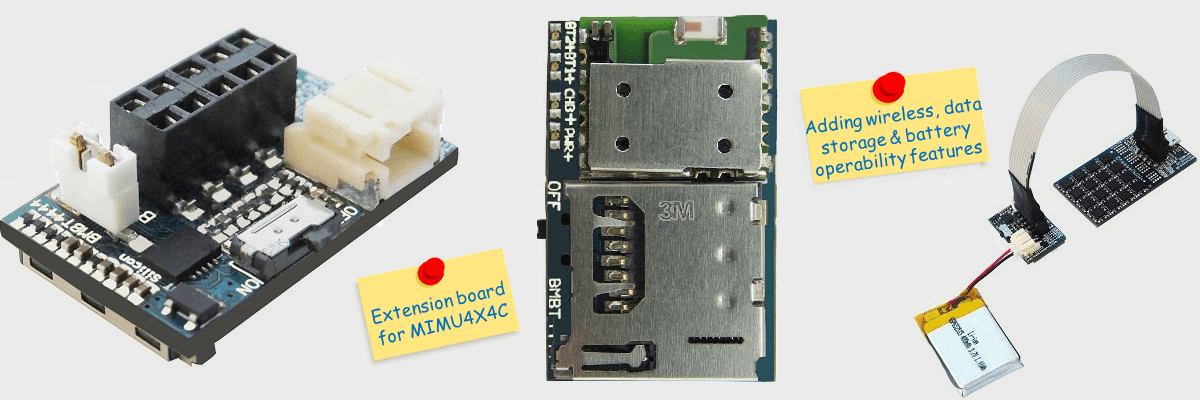
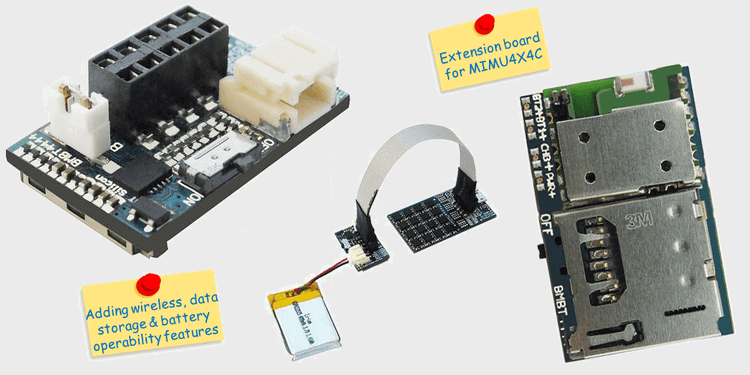
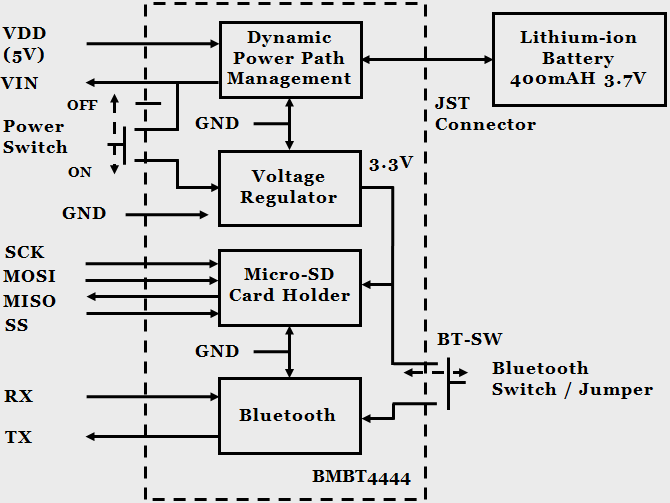
The BMBT4444 serves the purpose of extension board for MIMU48XC / MIMU4X6C. When used with MIMU48XC / MIMU4X6C, it adds wireless communication interface (Bluetooth), data storage (Micro SD Card) and battery (Li-ion rechargeable) as another powering option to the inertial sensor array module.
The BMBT4444 enables the Osmium MIMU48XC / MIMU4X6C to operate as an standalone module.
Please visit Support section for resources, tutorials, FAQs etc and Blog for more information on technology
")
")


